| このページは、2019年3月に保存されたアーカイブです。最新の内容ではない場合がありますのでご注意ください |
| 《改良点1》 | 展示ケースの手前側が傾斜しているために、一番線(一番手前の線)にやまばと号などの背の高い車両が入線できない問題がありました。一番線を20mm程奥側に移動させまると共に、一番線にポイントを直線(スルー)で進入出来るように改良しました。この結果、C4型やボールドウィンが入線出来るようになり、脱線事故減少のメリットも生まれました。 |
| 《改良点2》 | 子供に受けることを狙って、内側線に直径100mmのターンテーブル(転車台)を新設しました。レイアウトのベースボードは5.5mmベニヤ3枚合わせなので、天板を残すと裏側には高さ11mmのスペースしかありません。この極薄スペースに機構を組み込むことに苦労しました。(ライブスティームのメーカーとして有名な 和田ワークス 様に知恵を貸していただきました。)一目見て ターンテーブルが増えたことを言い当てる子がいて、子供の記憶力の良さに驚きました。 |
| A列車: | 珊瑚模型製加藤5t(キット組立)牽引のナベトロ列車(逆向き牽引) |
| B列車: | 珊瑚模型製酒井7t(キット組立)牽引のやまばと号(正向き牽引) |
| C列車: | 珊瑚模型製酒井5t(キット組立)牽引の運材列車(正向き牽引) |
| D列車: | バックマンのポーターサドルタンク |
| E列車: | 酒井5tの131号機(模型徒然号) |
| 注1) | 「F」は集材クレーンで、運材列車が到着するとブームを左右に動かします。 |
| 注2) | 模型徒然号とはオレンジカンパニー製の「助六の酒井」こと131号機のキットを組み立てたもので、 RMモデルス 誌に連載中の山下修司氏のコラム「模型徒然」でたびたび話題にされた車両です。長い間未塗装の状態でしたが、今回の展示に合わせて山下氏が塗装を行いました。詳しくは RMモデルス のバックナンバーをご覧下さい。 |
| 注3) | ターンテーブルは機構の都合で桁とピット底面が一緒に回ります。また、自動運転に対応するためにテーブル上に車両が存在するか否かの検出、テーブルからはみ出して停止していないかを検出する回路を設けています。 |
2003年11月12日 記

2002年11月17日 記
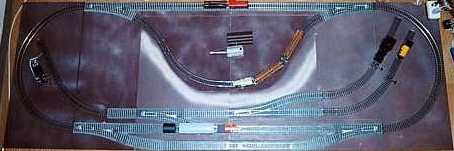 このレイアウトは木製枠・ガラス張りのケースに入れて展示するもので、1700×600mmの大きさがあります。線路には7基のポイント(内2基は固定)があり、レイアウト上に配置した5列車を、順次自動的に運転する事ができます。これらの制御は、線路内に埋め込んだ反射型センサーで列車位置を検出し、シーケンサーによりコントロールすることにより実現しています。脱線などのトラブルがなければ、手を触れることなく自動的に運転する事が可能で、期間中はたくさんの子供達に楽しんでいただきました。
このレイアウトは木製枠・ガラス張りのケースに入れて展示するもので、1700×600mmの大きさがあります。線路には7基のポイント(内2基は固定)があり、レイアウト上に配置した5列車を、順次自動的に運転する事ができます。これらの制御は、線路内に埋め込んだ反射型センサーで列車位置を検出し、シーケンサーによりコントロールすることにより実現しています。脱線などのトラブルがなければ、手を触れることなく自動的に運転する事が可能で、期間中はたくさんの子供達に楽しんでいただきました。
2002年7月9日 記

| このページは、2019年3月に保存されたアーカイブです。最新の内容ではない場合がありますのでご注意ください |