今まで幾つかのパワーパックを作成してきましたが、低速走行において何処までスローな運転が可能なのかと感じていました。
今までのパワーパックでは、1周約130cm(
TOMIXミニレールセット/レールパターンMA
)を利用して計測した所、1周を周回するのに、約30秒(約4cm/s)〜約45秒(約3cm/s)でした。秒速の差は、モーターの差に起因する物で、「鉄コレ動力」では、比較的電圧(約1V〜約1.2V)を落とせる様で、やや低速走行に向いている様です。しかし、「Bトレ動力」では、「鉄コレ動力」ほど電圧(約1.25V)を落とすと停止してしまいました。
また、起動時の電圧も、「Bトレ動力」は約2Vを要し、「鉄コレ動力」では約1.5V程度で起動しました。(ちょっと前の動力では、もう少し起動電力も高い様です。その分、走り出しが急になる事が予想されます。)
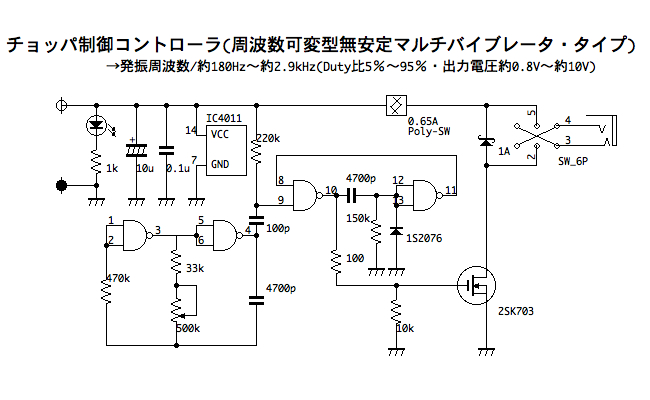
そんな低速走行をコントロール出来る様な回路を捜す中で、以前から気になっていた
「たのしくできる やさしいディジタル回路の実験」白土義男著/東京電機大学出版局発行
のP123〜P125にある「チョッパコントローラの実験」(
プレビュー
)を参考に「可変周波数無安定マルチバイブレータ回路」と「パルストリガー型ワンショット(単安定)マルチバイブレータ回路」を組み合わせ応用した回路をIC:4011(原典はIC:74HC00の5V利用)を用いるタイプ(12V電源アダプター利用)に変更し、また、ブレッドボードによるテスト(正式な設計等は行なっておりません。誤動作等があるかもしれませんので、そこは自己責任でお願いします。)で試した後、一部抵抗を変更してみました。もし、不安のある方は、原典を参考に作成してみて下さい。
コチラが、作成した回路の実体配線(表裏)例です。何かの参考になるでしょうか?
;)
;)
作成し、テスト走行を行なった結果としては、最小電圧を約0.8Vまで落とせ、「鉄コレ動力」においては、1周70秒〜75秒の約1.7cm/sの低速走行が可能であると確認出来ました。他の動力においても、1周60秒程度(約2.2cm/s)までの低速走行は出来ました。
また、初速も起動電圧がかなり低く抑えられるため、低速のスタートが出来た様に感じます。
しかし、「鉄コレ動力」のモーターや線路等の集電部の整備状況によっては、可変抵抗(ボリューム)を最小に絞っても、完全に停止しない物もありました。
更に(人によっては最大の問題)は、低速走行が可能である分、周波数をかなり(最小約180Hz)落としてあるため、モーターへの負荷が増えることが心配されます。加えて、低速時のノイズが結構耳につくかもしれませんので、その点は理解した上で、作成される方はお願いします。
なお、作成に取り組む前には、必ず原典の
「たのしくできる やさしいディジタル回路の実験」
のP123〜P125にある「チョッパコントローラの実験」(
プレビュー
)に目を通して下さい。(ディジタル回路作成においてかなり参考になると思います。また、私も幾つかのアイデアをこの本より貰っています。)
追記:
チョッパ制御のパワーパックの
試験運転(動画)
を撮影しましたので、アップします。
なお、今回は「鉄コレ動力(12m級)」を使用しました。他の動力でも、これに近い状態を得る事が出来ました。
試験走行は
動画
の通り、低速走行は可能ですが、起動時の電圧が走行時の電圧より高めのため、初速がやや安定せず、多少引っ掛かりのある様な動きや、やや急加速気味の感は否めないと感じました。よりスムーズな初動が今後の課題だと思っています。
また、今回のテストの際は、回路図の発振部(周波数を可変する)の可変抵抗(ボリューム)を500kΩから1MΩへ変更してみました。周波数(約90Hz)を落としたため、初動までの電圧制御の幅が取れ「鉄コレ動力」においても、停止させられました。
しかし、その分ボリュームを大きく動かさないと起動しなくなっています。(良い意味でも、悪い意味でも)が、通常の走行においては、とても安定した低速を維持出来る事もあり、予想以上に使いやすいパワーパックが出来たと思っています。